Pandalism
Felix DMR's Blog
Programming, Electronics, Autonomous Vehicles and other interests!
Copyright © 2023 Pandalism

06 April 2019
So back in November I posted on Instagram about the new drone/quadcopter I just built, in an attempt to get back into drones and FPVracing. After that first post though, a keen eye will notice I never mentioned it again, until now. This is the rise and fall of Skippy.
The build (The Rise)
To start with, I should mention the build itself, its practically all taken from this rotorbuilds.com guide so all credit to them.
- Diatone GT-M200 frame
- Racerstar TattooF4S 4in1 flight controller
- DYS Samguk 2207 2300kv motors
- Dalprop 3-blade T5046C
- Runcam Micro Sparrow 2 FPV camera
- PandaRC Mini5804 vtx
- Frsky xm+ rx
- One of those newfangled “Pagoda” Antennas (which btw, is a pretty neat evolution of the circularly polarized antennas that can be made on PCBs)
Overall, it ended up costing around ~£250 with a battery. Here’s some pretty pictures building it:
 GT-M200 frame built up
GT-M200 frame built up
 Soldering in the reciever and checking the FPV camera
Soldering in the reciever and checking the FPV camera
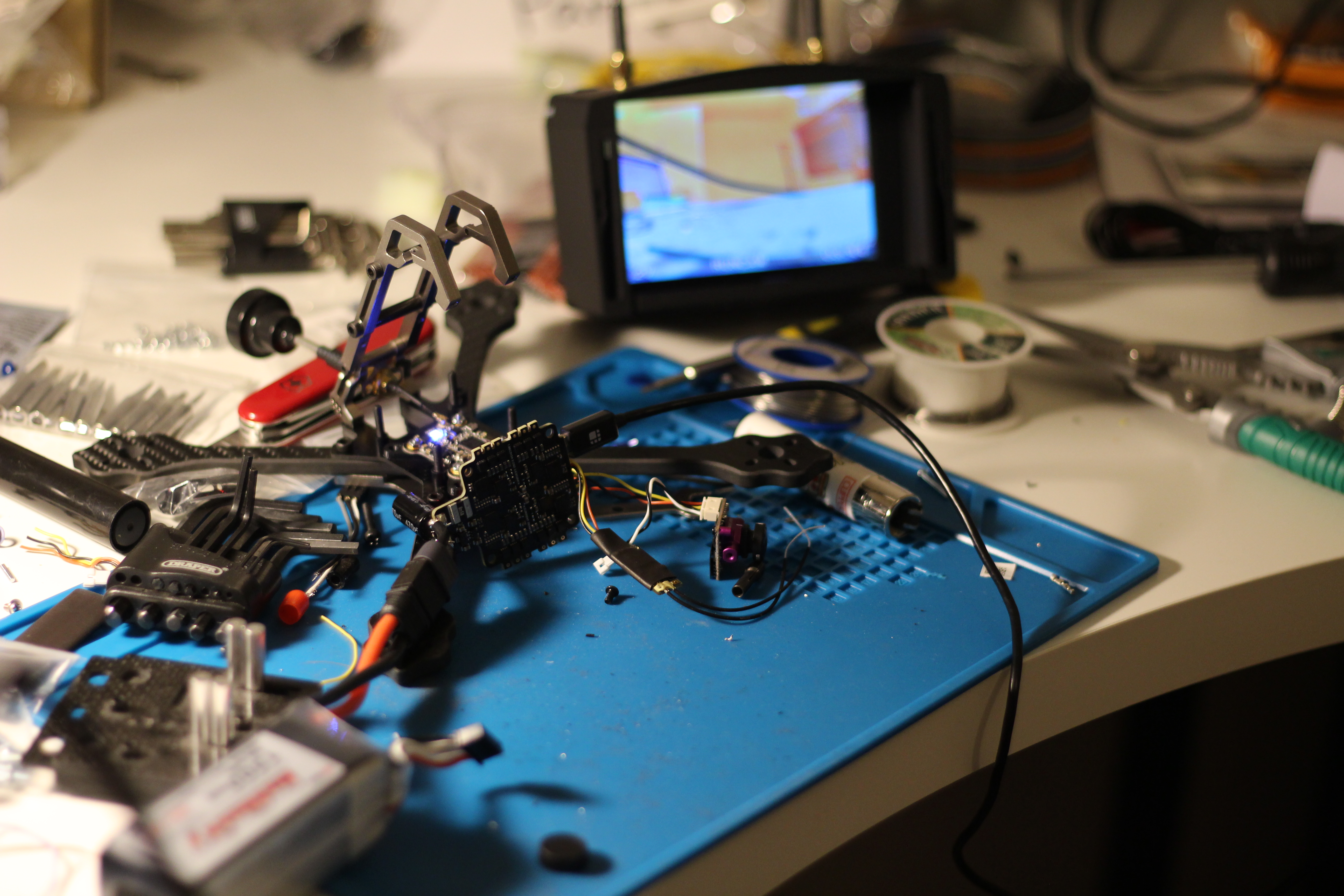
 Connecting it up to the PC and checking config, note the tight packaging
Connecting it up to the PC and checking config, note the tight packaging
The build was relatively simple, and although my other builds way back were on the slightly larger 250mm-class drones, this frame was actually still quite easy to work around. I was quite impressed with how small the device was, and how far flight controllers and electronic speed controllers had evolved (You could even put music on them now!).
Flying it for the first time (The Fall)
All built up, it was looking sweet, like a tiny angry air beating machine. I was so excited to try it out I even hovered it inside my room (Note this is a terrible idea, those props will fuck your day up or your belongings). I double checked the failsafes, the lost quad beeping mode, the calibration and then charged up the batteries and waited.
When Saturday finally arrived I headed down to my local fields, loaded with equipment and spares, and a little too much confidence. Again I double checked the screws and retightened everything, checked the failsafes, checked the camera was working, and set off. Now, flying small drones in acro mode with goggles is actually quite hard; it didn’t look like the smooth videos on youtube, darting between trees and derelict construction sites. There was a lot of panic strafing and accidental bopping against the floor. Nonetheless sooner or later I was flying, albeit cautiously, between goal posts and doing simple flips. Overall good day, but the sun was coming down and it was time to pack up.
“But then again, what harm could one more flight do?” - My dumb dumb self
I lost visual reference and speed across the field into the floor, hitting it hard and sending it flying back up, spinning another 20 meters into some bushes. Since I was wearing goggles I couldn’t see where it landed and the spinning had seriously disorientated me. But its fine, what else is the find-lost-quad mode for? Of course that’s when it hit me, that if I had lost video signal, it’s probably because the battery ejected, and if it did that then the ESCs can’t beep and its all fucked.
I searched and searched, methodically across all the bushes on the side of the field, to no avail. Then going to check the goggles themselves to see the recorded FPV videos I realised I hadn’t recorded anything at all, instead taking stills when I thought it was turned on.
 My last beacon of hope ended up being this shitty still
My last beacon of hope ended up being this shitty still
At midnight I left, and came around looking again next Sunday, and then the Monday morning before work, and Tuesday, and … etc. By the next Saturday I admitted defeat and declared Skippy (named post mortem due to its proclivity to skip on the floor) officially MIA. Goddamnit.
Conclusion
Lessons learned (the expensive way):
- Failsafes and beepers are great until your battery ejects. Need to make some sort of lock so even if it falls off the platform it doesn’t disconnect.
- Make sure the DVR function is working before flying in earnest.
- Practice more on simulators before flying for real (this one should have been clear to me after all the simulation/HIL engineering I’ve done)
Credit
- Rotorbuilds for making a super nice build so that I dont have to whip out the calculator to size the components.
- Hobbyking and Banggood for making this hobby cheap enough that I can brush this off with only part of my soul dying.
Copyright © 2023 Pandalism